
Arduino: obsługuj silnik krokowy - jak to działa
Silnik krokowy nie obraca się po przyłożeniu napięcia, ale wykonuje małe kroki. Z Arduino możesz łatwo kontrolować taki silnik. W tym praktycznym poradniku możesz dowiedzieć się, jak to zrobić.
Arduino: obsługuj silnik krokowy - jak to działa
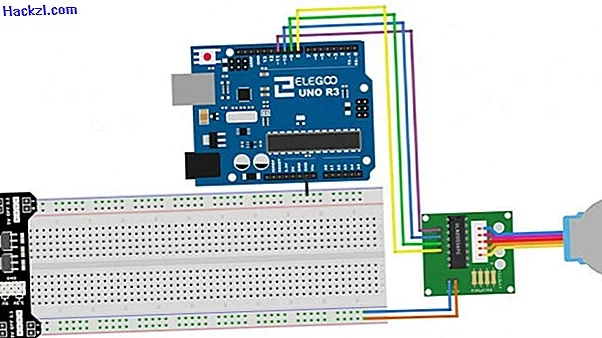
Silnik krokowy jest urządzeniem elektromechanicznym, które przekształca impulsy elektryczne w dyskretne ruchy mechaniczne. Aby kontrolować taki silnik krokowy za pomocą Arduino, potrzebujesz płyty sterownika silnika krokowego. Połącz wszystkie elementy, jak pokazano na rysunku.
- Następnie należy zaimportować wymaganą bibliotekę za pomocą polecenia „#include”.
- Za pomocą polecenia „const int stepsPerRevolution = 1500;” określić, ile kroków powinien wykonać silnik w jednym obrocie.
- W zależności od sposobu podłączenia steppera musisz utworzyć nowy obiekt steppera. Możesz to zrobić za pomocą polecenia „Stepper myStepper (stepsPerRevolution, 8, 10, 9, 11);”.
- Teraz ustaw prędkość w metodzie konfiguracji: „myStepper.setSpeed (20);”.
- Teraz możesz użyć polecenia „myStepper.step (stepsPerRevolution);” powiedz, że powinien wykonać pełny obrót zgodnie z ruchem wskazówek zegara.
W następnym artykule wyjaśnimy, jak skonfigurować moduł GSM w Arduino.